CESI works on the simulation and optimisation of the robot treatment process. Regarding the numerous constraints related to the robots task execution, there are several manners to execute these tasks. On the one hand, the UV-robot has a limited battery capacity allowing it to treat only a set of rows. The main question is which row should be treated first? On the another hand, the level of disease is stochastic which also makes the treatment time stochastic. A simulation of the robot functioning is developed to consider these stochastic phenomena and to evaluate the efficiency of the proposed optimisation algorithms.
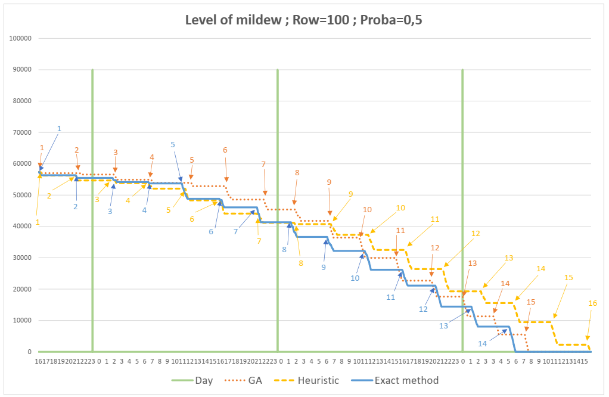
Three different methods where proposed to optimise the mission of the robot. First, a heuristic approach was proposed, where first the rows taking more time are treated followed by treatment of other rows with the remaining battery capacity. The second approach uses an exact solution which cannot converge when the number of infected rows is high. The last method is based on a genetic algorithm, which is considered as a good compromise between the quality of solution and resolution time.